Tipy na plavbu kolem Mallorky

Publikováno 1.2.2022
V tomto článku si ukážeme jak optimálně plánovat trasu plavby vzhledem ke známé předpovědi počasí bez použití placeného software, tedy jak říkám - ručně. Proto si zde nebudeme představovat weather routingové programy, které využívají závodní posádky, ale seznámíme se s principy optimalizace plavby, abychom je pochopili. Tato znalost pak pomůže v plánování trasy plavby i bez drahých programů.
Weather routing je služba poskytovaná komerčními společnostmi pro optimalizaci tras nákladních lodí vzhledem k očekávaným meteorologickým podmínkám. V oblasti námořního jachtingu se pochopitelně začal aplikovat také, zvláště pro závodní lodě, kde kvalita weather routingu na dlouhých etapách rozhoduje o vítězství.
Pro naše účely rekreačního jachtingu budeme za weather routing považovat metodu kterou stanovíme optimální trasu a čas vyplutí pro dosažení cíle s ohledem na předpověď větrů. Jako omezující podmínku si dáme maximální rychlost větru za kterého ještě jsme ochotni plout. Pro navržení trasy dále potřebujeme znát rychlosti naší lodi při různých sílách a směrech větru. Tyto rychlosti jsou udané v polárním diagramu, který však často ke konkrétní lodi neznáme. Pokud nemáme polární diagram, musíme si vystačit s odhadem rychlostí naší lodi. Dále potřebujeme pro oblast plánované trasy mít předpovědní modely větrů pro jednotlivé časové úseky.
Z předpovědního modelu získáme informaci o předpokládaném skutečném větru. Pro plavbu je však podstatný vítr zdánlivý. V okamžiku, kdy loď pluje, vytváří si na palubě čelní vítr svým pohybem. V případě bezvětří bychom tak na lodi vnímali vítr od přídě o rychlosti stejné jako je rychlost lodi. Tento vítr označujeme jako zdánlivý. Skutečný vítr je ten, který fouká nad povrchem a pokud by loď stála třeba na kotvě, vnímali bychom pouze skutečný vítr. Za pohybu lodě je zdánlivý vítr dán vektorovým součtem větru skutečného a větru vyvolaného pohybem lodě. Pro plavbu a nastavení plachet je podstatný zdánlivý vítr - ten na plachty působí, protože plachty se pohybují společně s lodí. Při předobočních kurzech je zdánlivý vítr vždy silnější než skutečný a naopak při zadních a zadobočních kurzech zdánlivý vítr je slabší než vítr skutečný. Zdánlivý vítr určíme graficky jako vektorový součet skutečného a čelního větru. Úhel (α) je úhel o který je směr zdánlivého větru odlišný od směru skutečného větru.
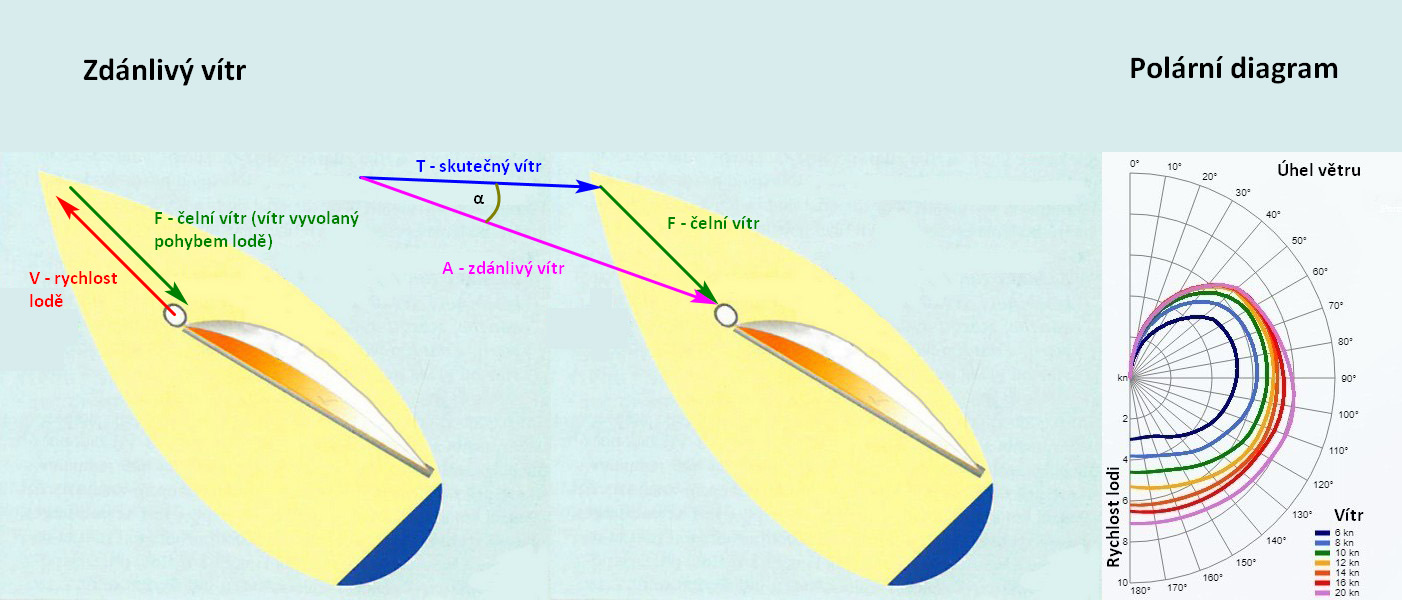
Polární diagram znázorňuje rychlost lodi ve vztahu k úhlu a rychlosti větru. Polární diagram obvykle udává výrobce lodi. Je nutné vědět pro jaké plachty je polární diagram uváděn a zda je vytvořen pro skutečný nebo zdánlivý vítr. Také bývá polární diagram vytvořen pro hladkou vodu bez vln, v praxi však loď pluje po zvlněné hladině a uváděné rychlosti nemusí dosáhnout díky ztrátám hnací síly způsobené vlnami. Diagram nemusí být nutně v grafické podobě ale může mít třeba podobu tabulky. Pokud diagram nemáme nebo hodnoty rychlosti, které za daného větru s lodí dosahujeme neodpovídají uváděným hodnotám, je potřeba diagram si vytvořit nebo jej opravit. Za tímto účelem si v průběhu plaveb zapisuji rychlost lodi, rychlost a úhel zdánlivého větru k použitým plachtám do tabulky a dále tak polární diagram zpřesňuji.
Pro získání předpovědních modelů existuje dnes řada aplikací. Já sám nejraději používám aplikaci ZyGrib pro OS Windows, kde mám stažená data kdykoli k dispozici i off-line. Je nutné mít na paměti, že zobrazená data z GFS modelu jsou v rastru 15 námořních mil. Jde o vypočítanou situaci, která je předpokládaným průměrem podmínek pro čtverec o hraně 15 mil.
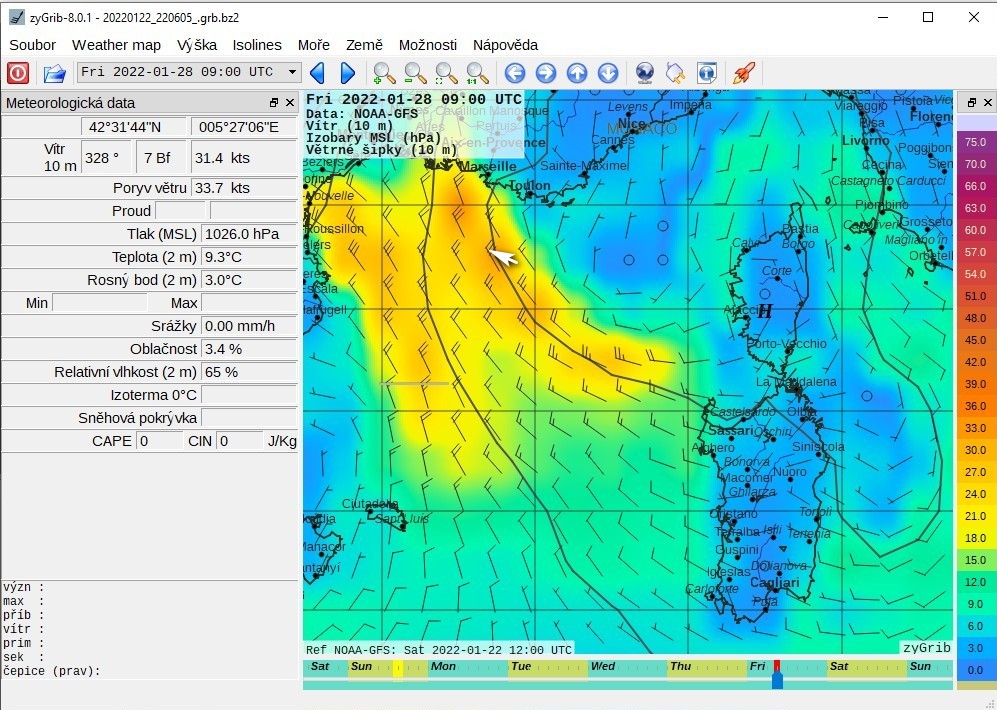
Výhodou programu pro plánování trasy je jednak přehledné zobrazení nejen rychlosti a kurzu větru ve sloupci meteorologická data, kde se ukazují data pro místo na mapě, na které ukazujeme kurzorem. Další výhodou je také možnost si nad mapou vkládat uživatelské body, které využívám právě k plánování trasy.
Weather routingový program na základě polárního diagramu a zadání místa startu a cíle sám propočítá velké množství variant trasy vzhledem k předpovědi počasí, její vývoji v čase a navrhne optimální trasu. Můžete si vyzkoušet například v programu FastSeas. Můžete zde získat propočty trasy i na následující dny a rozhodnout se i kdy bude nejlepší datum pro vyplutí. My se však zaměříme na méně přesný způsob bez použití specializovaného programu, zato zcela offline bez nutnosti průběžného internetového připojení za plavby.
Praktický postup si vysvětlíme na příkladu:
Chceme plout z přístavu Bonifacio na Korzice do přístavu Mahón na Menorce. Naměřená délka ideální trasy je přibližně
240 NM. To za dobrých podmínek bude znamenat čas plavby přibližně 2 dny. Den vyplutí plánujeme na čtvrtek 27.1.2022.
Před vyplutím si zaktualizujeme předpovědní data v programu ZyGrib alespoň na 3 dny dále. Pro čtvrtek v 9:00 UTC (pro nás
bude místní čas 10:00) náš čas vyplutí, vypadá předpověd takto:
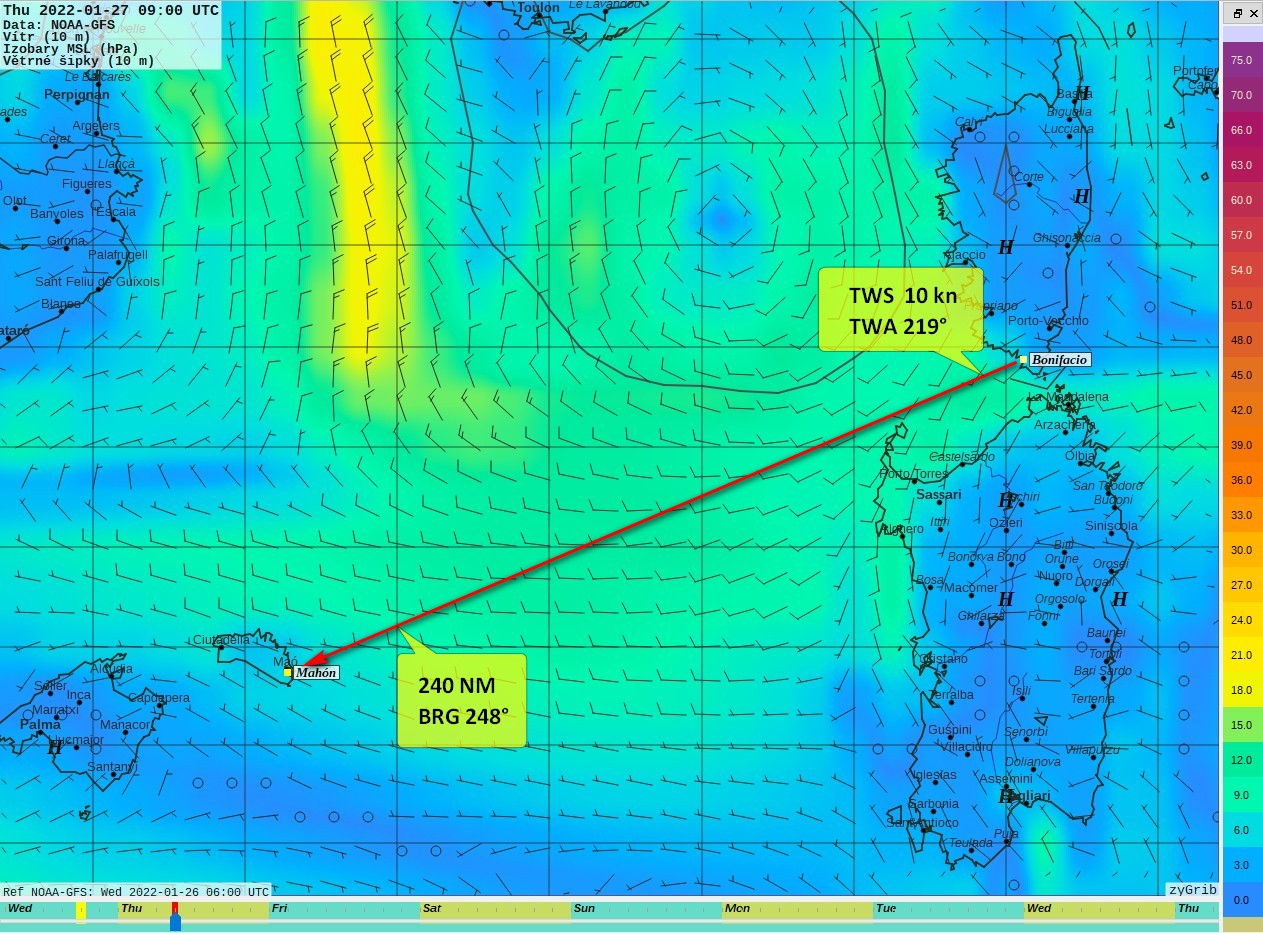
Skutečný vítr asi 10 mil od pobřeží bude foukat rychlostí 10kn (TWS - true wind speed) a ze směru 219° (TWA - true wind angle). Rozdíl mezi naším požadovaným kurzem a úhlem větru je 248°-219°=29°. Pozor tady se často chybuje. Na první pohled situace svádí k představě, že vítr bude přibližně kolem 30° od přídě, tedy loď bude schopná plout. Není to však pravda, protože uvedené by platilo v případě nulové rychlosti lodě. Zde si musíme stanovit jak rychle poplujeme a spočítat úhel zdánlivého větru (AWA - apparent wind angle) a jeho rychlost (AWS - apparent wind speed). Nejsnadněji to uděláme grafickou metodou. Rychlost lodi odečteme z polárního diagramu pro vítr 10kn (zelená křivka) a kurz ostře proti větru 35°. Rychlost lodi z diagramu bude asi 5 kn. Nyní narýsujeme úsečku větru (TWS) dlouhou podle rychlosti větru např. 10cm. Z konce úsečky pod úhlem našeho reálného stoupání 35° vyneseme úsečku rychlosti lodi (V) dlouhou 5cm. Narýsujeme přeponu AWS a změříme ji. Zjistili jsme, že je dlouhá 14 cm. Náš zdánlivý vítr (AWS) bude foukat rychlostí 14 kn. Změříme úhel (α) a ten je 10°.
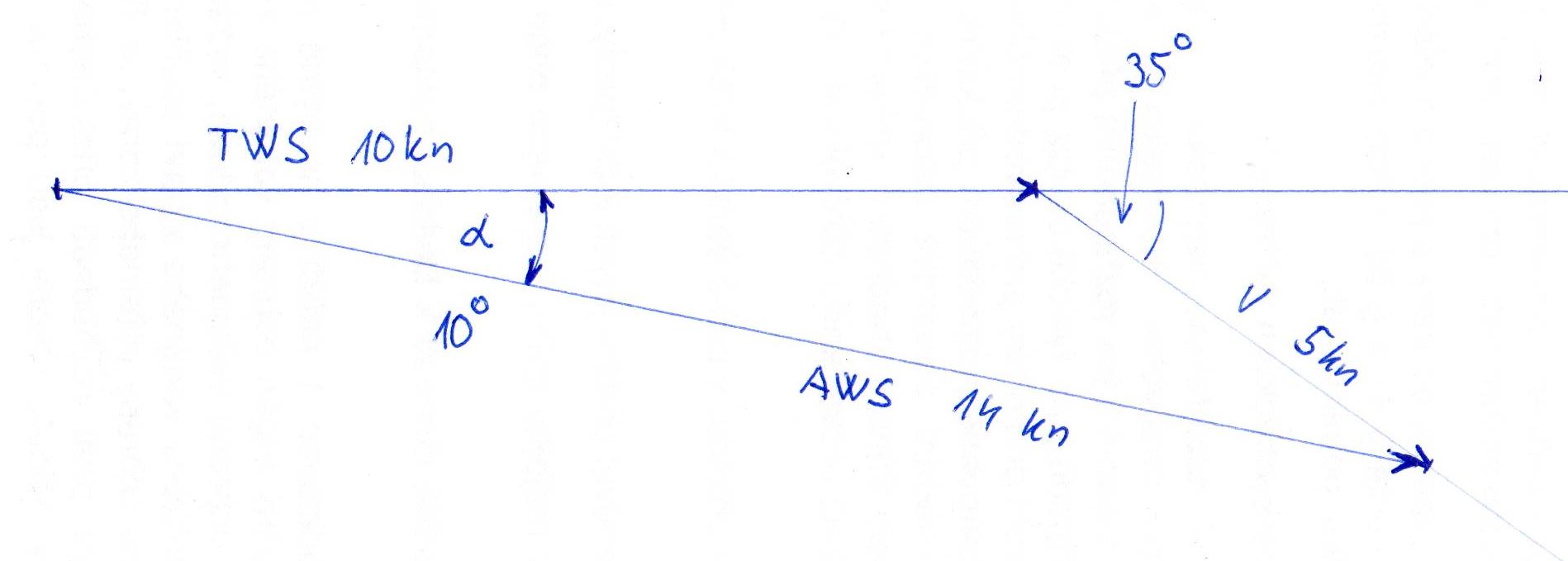
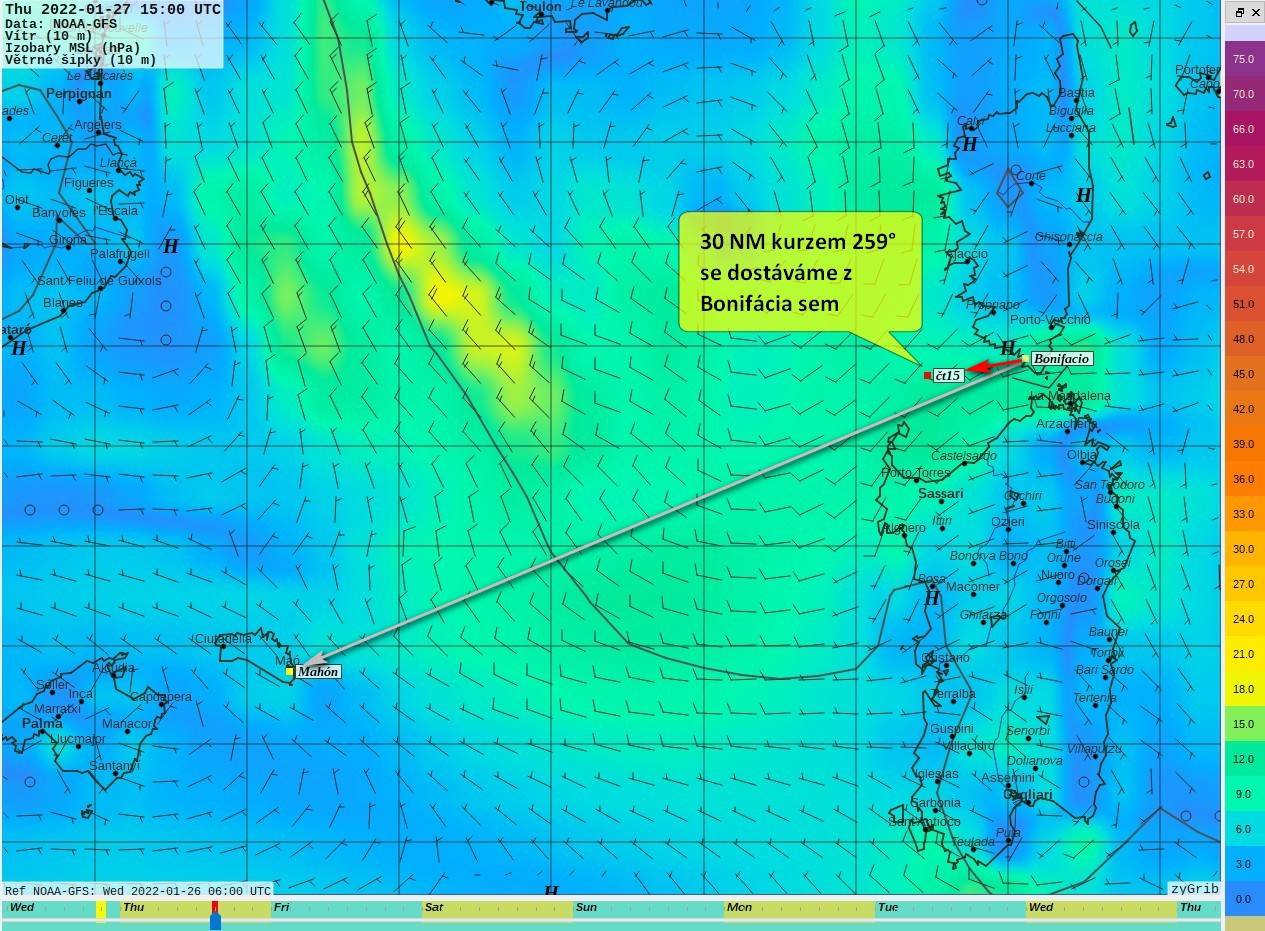
Zdánlivý vítr se stočí o 10° více k přídi. Úhel zdánlivého větru AWA bude 219°+10°=229°. Na původně plánovaném kurzu by nám loď neplula. Dosažitelný kurz plavby zjistíme tak, že k AWA přičtu úhel 35° pod kterým budeme stoupat. Kurz lodi kterým budeme schopni plout bude 229°+35°= 259°. Na předpovědním modelu si začneme posouvat čas po jednotlivých krocích vpřed a sledovat kdy se vzhledem k odhadu naší polohy ve zvoleném čase změní vítr tak, že budeme muset změnit kurz plavby. Vidíme, že 6 hodin až do 15:00 UTC můžeme plout stanoveným kurzem. Za další 3 hodiny se vítr bude stáčet více proti našemu kurzu a nám nezbyde než kurz změnit. Místo kam doplujeme stanoveným kurzem do 15 hodin si na mapě označíme takto: 6 hodin plavby rychlostí 5 kn znamená uplutou vzdálenost 30 NM. Na monitor si položíme klidně úhloměr a vzdálenost 30 MN odměříme ve směru plavby jako 30 minut zeměpisné šířky jako bychom pracovali s klasickou papírovou námořní mapou. Na obrázku právě svislá vzdálenost mezi rovnoběžkami je 30 úhlových minut. Na odměřené místo klikneme pravým tlačítkem myši a vytvoříme uživatelský bod. Do mapy na ZyGribu jsme si takto vynesli předpokládaný bod, kde budeme v 15:00 UTC měnit kurz.
Z vytvořeného bodu naplánujeme další postup s ohledem na podmínky pro další časový úsek. Opakováním tohoto postupu naplánujeme trasu až do cíle. Při plánování můžeme zohlednit i další faktory jako výšku vln nebo přílišnou sílu větru, které se chceme vyhnout. Pokud se dostaneme v průběhu plánování s trasou do bezvětří nebo naopak do příliš těžkých podmínek na moři, vrátíme se v čase a trasu začneme plánovat s ohledem na toto zjištění. Dobré naplánování trasy je vlastně iterační proces. Celý plán plavby z Bonifacia do Mahónu pak může vypadat takto:
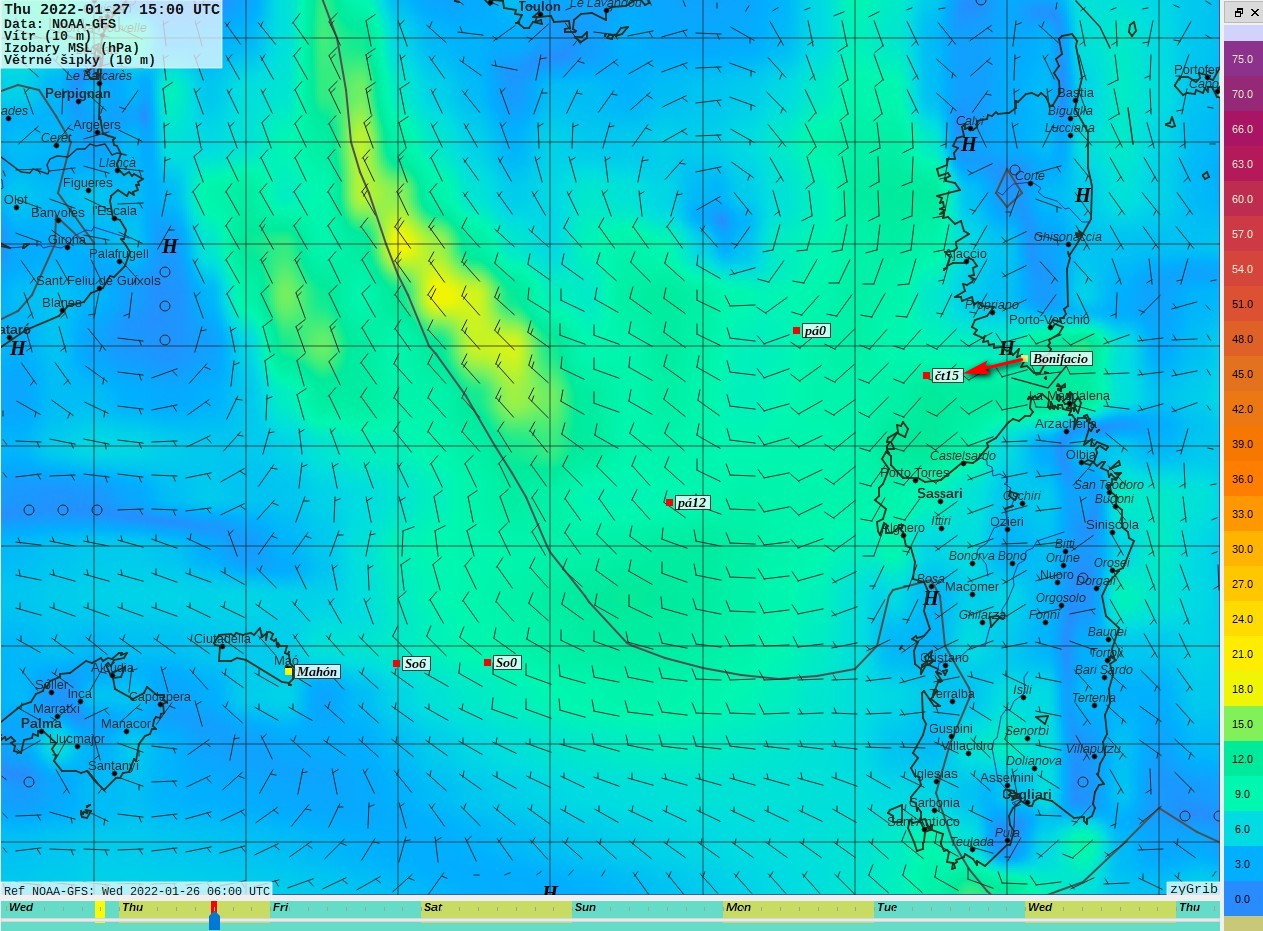
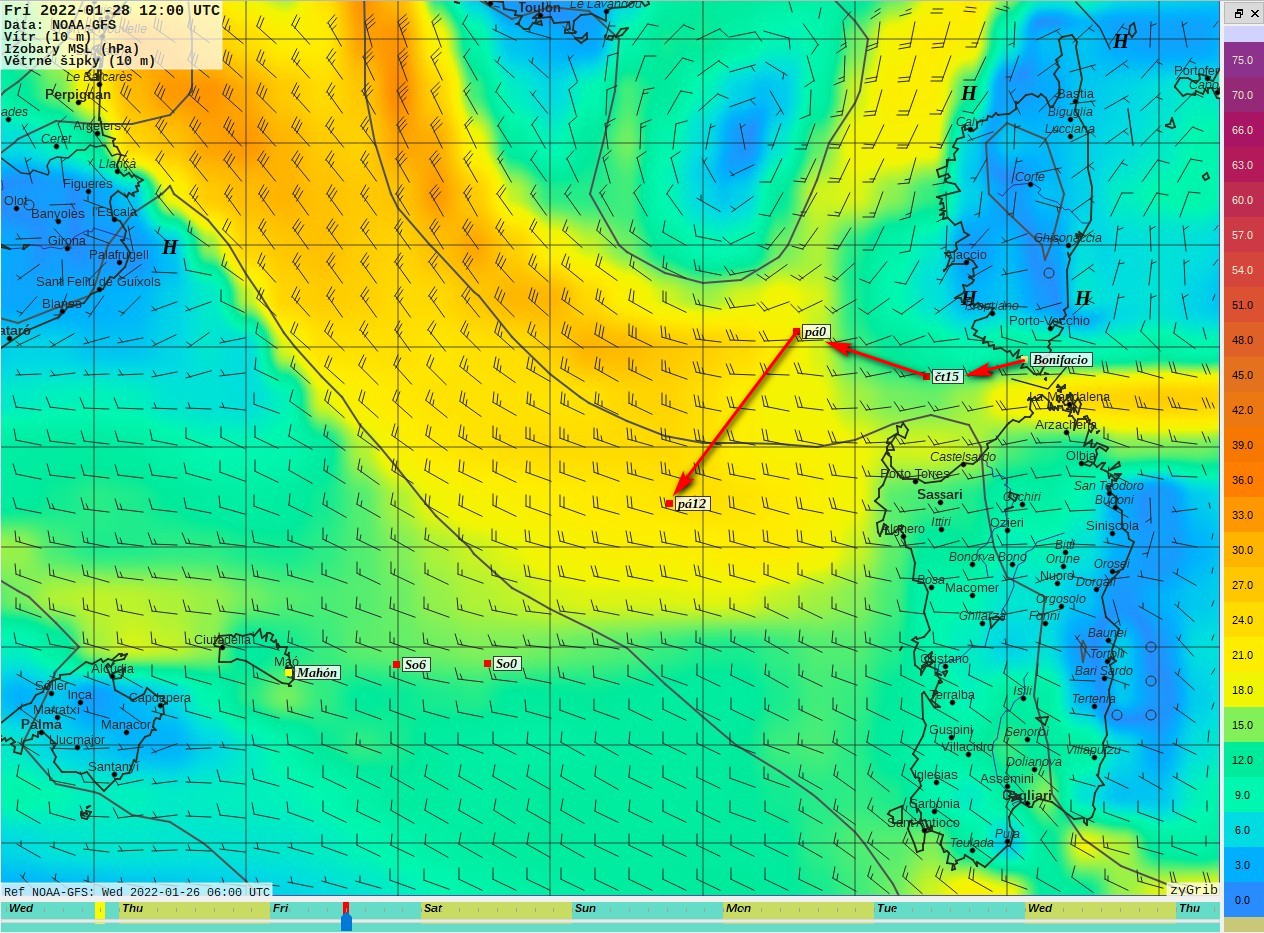
Abychom si prohlédli jak nám bude foukat v jednotlivých bodech trasy musíme si trasu prohlédnout jako animaci v čase se měnících větrných podmínek. Čtvrtek etapa do 15 hodin.
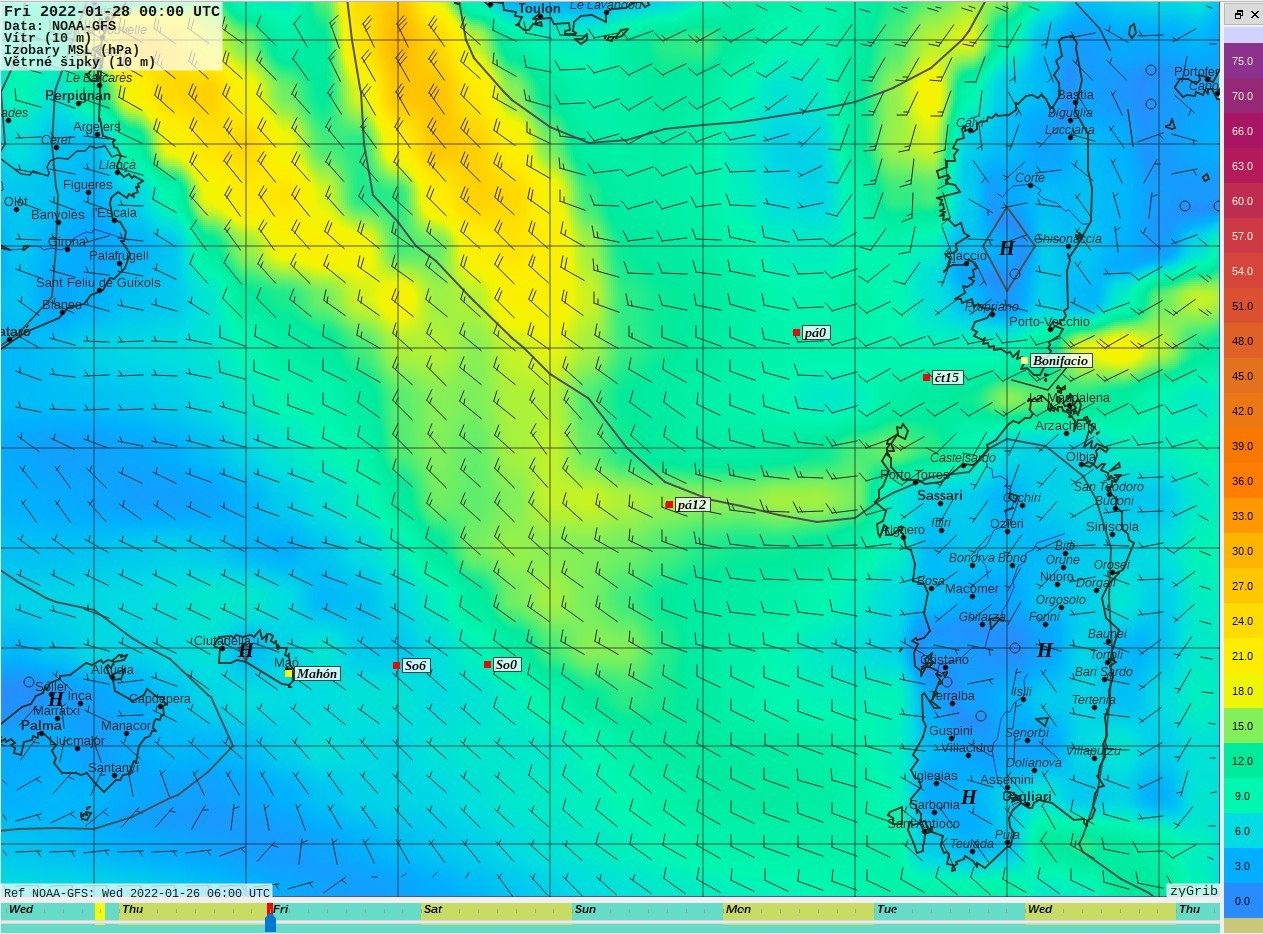
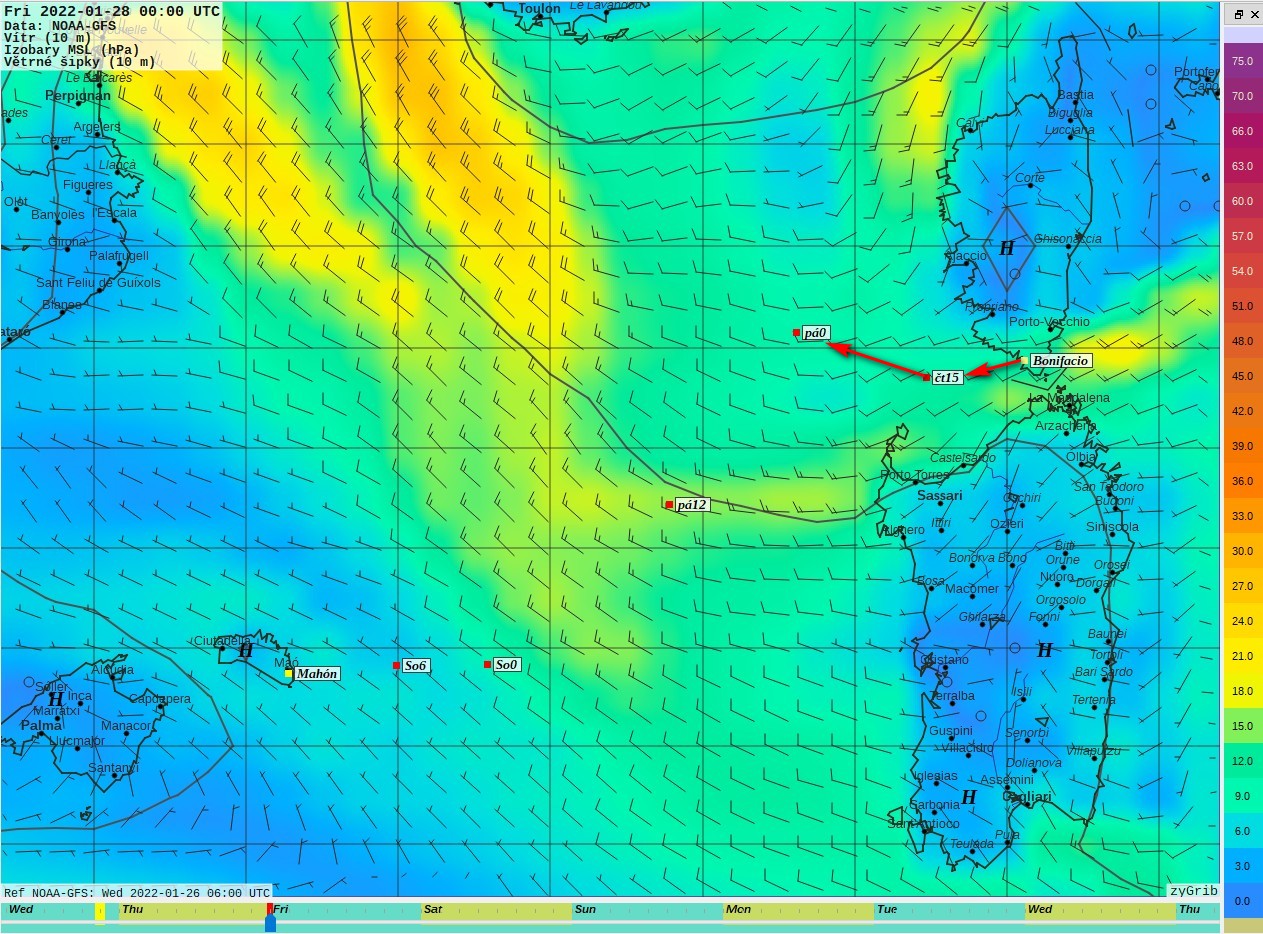
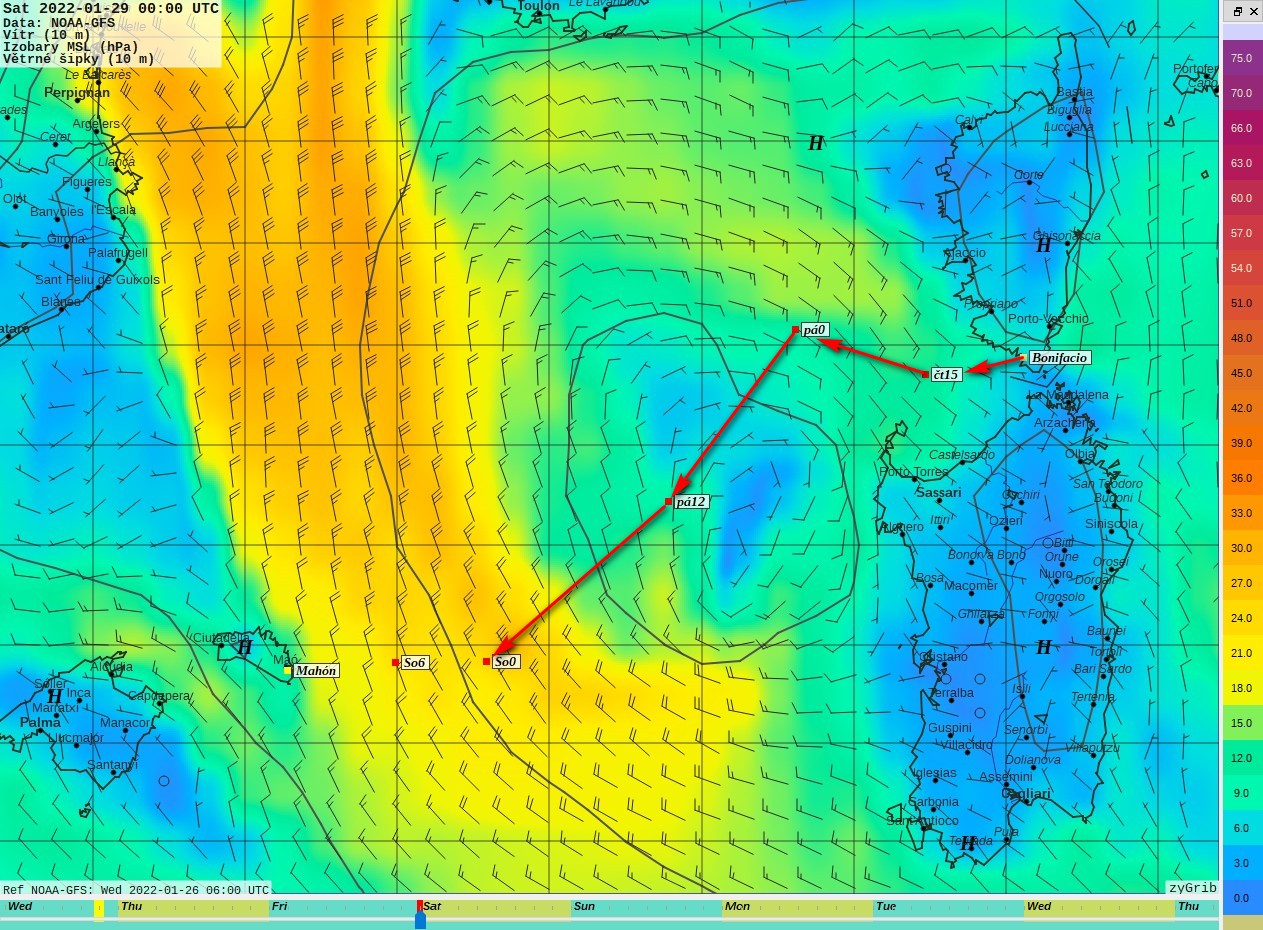
Pátek 0 hodin ráno.
Pátek 12 hodin.
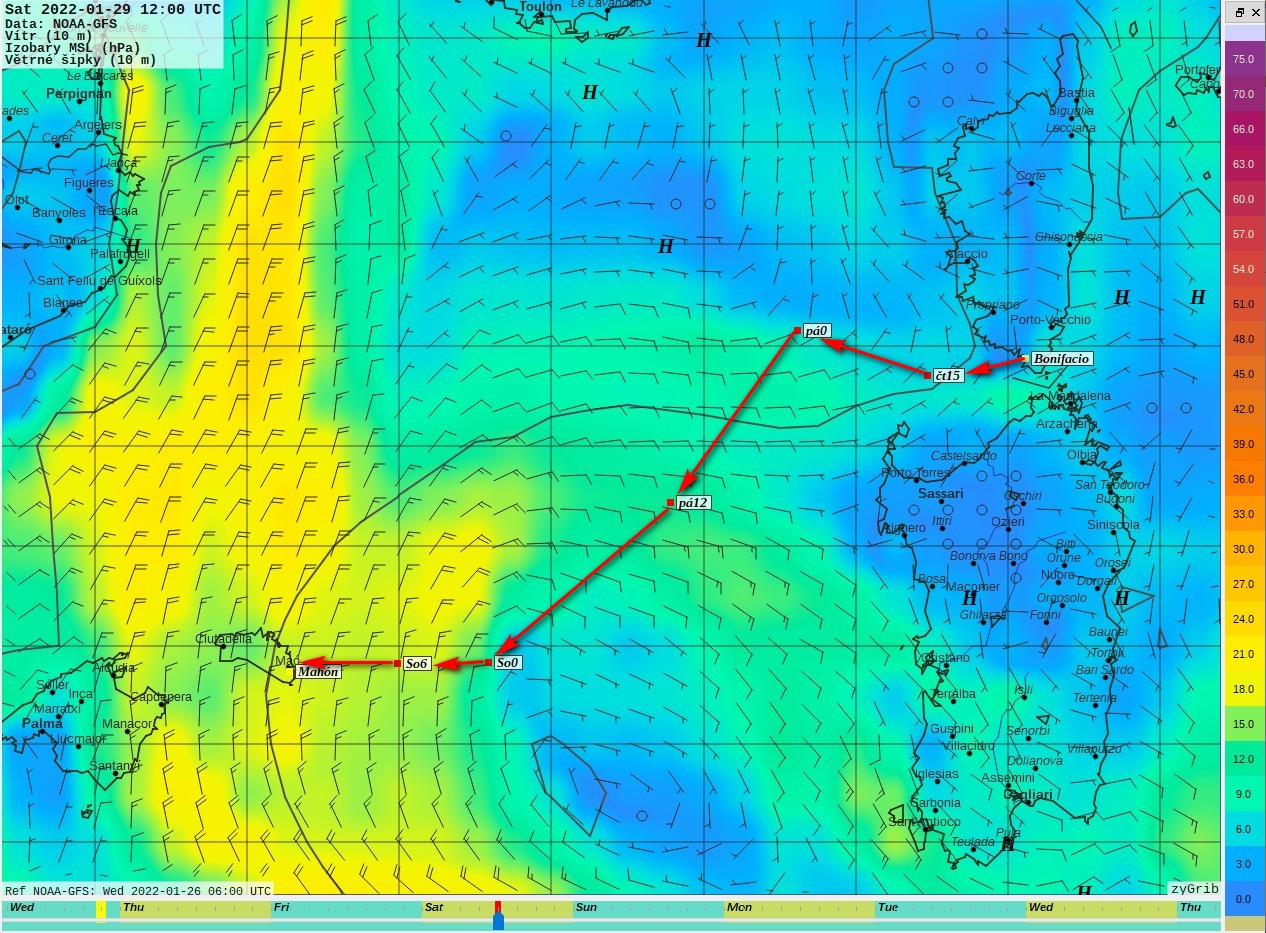
Sobota 0 hodin ráno.
Sobota 12 hodin měli bychom být v cíli.
V průběhu plavby skutečné podmínky mohou být odlišné od předpovědi a tak kurz plavby a její rychlost se od plánu často liší. Proto v průběhu plavby zaznamenáváme skutečnou polohu lodi jinou barvou do původního plánu a korigujeme další trasu vzhledem k nastalým odchylkám. Právě zde oceňuji off-line řešení, protože s uloženými předpovědními daty v programu ZyGrib mohu pracovat bez Internetového připojení, které na dlouhých přeplavbách nebývá možné nebo vychází přes satelitní sítě zbytečně draho.
Ze začátku se vám bude tento postup třeba zdát namáhavý, ale vyplatí se věnovat mu čas. S přibývající praxí se čas k naplánování trasy bude zkracovat a stočení úhlu větru mezi skutečným a zdánlivým větrem si už odhadnete bez nutnosti grafického řešení skládání vektorů.
Pro své stabilní počasí je Mallorka vhodnou destinací i pro začínající jachtaře a odmění se jim nádherně průzračnou vodou a množstvím kotvišť na svém pobřeží. V článku uvádím zajímavá místa u pobřeží Mallorky, která jsem navštívil, včetně informací o hloubce a podmínkách pro zakotvení. Místa jsou v článku zobrazena na interaktivní mapě spolu se souřadnicemi pro vaši snadnou navigaci na dané místo. Prozkoumejte např. ráj Středomoří: ostrov Cabrera. (Publikováno 1.1.2023)

Při svých plavbách jsem se už několikrát dostal do situace, kdy jsem se musel potopit pod loď. Bohužel ne vždy se problém dá vyřešit potápěním na nádech. Nakonec jsem se propracoval k potápěčské výstroji, která je pro můj účel postačující. V následujícím článku popisuji, co považuji za užitečné pro takovéto servisní potápění. (Publikováno 1.9.2022)

Stále ve svých posádkách setkávám s těmi, kteří z obavy před klasickou plachtou raději volí tu rolovací. V dalším textu si ukážeme, že není třeba se klasické plachty obávat a práce s ní se dá zvládnout i při sólové plavbě. Přečtěte si o výhodách hlavní plachty a podívejte se na návod, jak ji vytáhnout, zkasat či zrefovat. (Publikováno 1.7.2020)