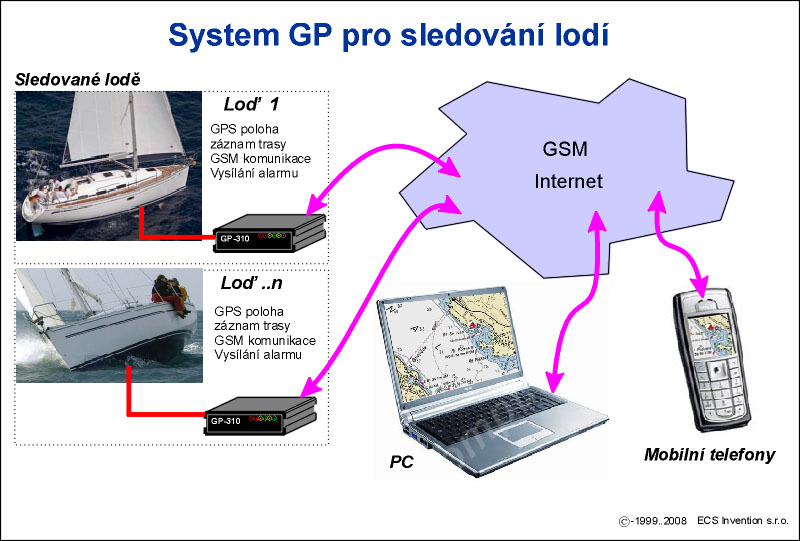
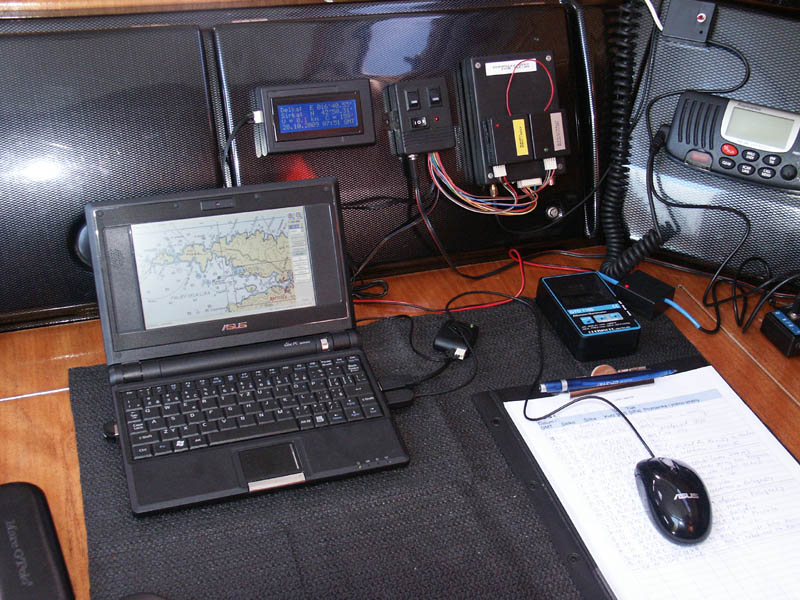
Při plavbě nám pomáhají i některé přístroje, které pocházejí z vlastního vývoje a jsou svým zaměřením určeny právě pro yachting. Jde především o specializovaný přístroj s GPS přijímačem GP-307M, který je prostřednictvím USB připojen k notebooku a vytváří spolu s příslušnými programy sestavu pro navigaci, automatický záznam propluté trasy a hlídání polohy při kotvení. Navíc sestava může i bezdrátově odesílat informaci o poloze díky které nás lze on-line sledovat, kde právě plujeme.
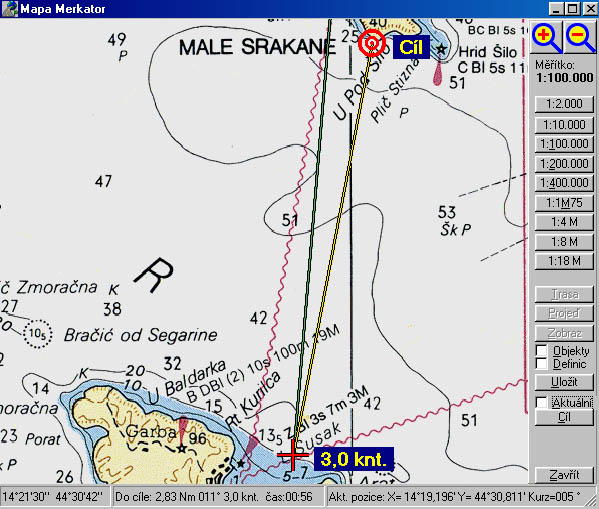
Pro vlastní navigaci používáme software NaviYacht z vlastního vývoje určený pro PC s operačním systémem Windows. Mám teno program nejraději pro jeho jednoduchost. Ať pluji na jakékoli lodi vezmu svůj notebook s GPS a vždy mám sebou prostředí na které jsem zvyklý. Program automaticky přepíná vrstvy map a přechází spojitě mezi jednotlivými mapami podle aktuální polohy lodi a nastaveného zoomu. Jedním kliknutím mohu zadat cíl ke kterému chci plout a kormidlem srovnám zelenou a žlutou přímku do zákrytu. Pro mne další důležitá výhoda je v tom, že program může použít mé vlastní námořní mapy, které naskenuji a vložím do programu, případně i za plavby mohu vložit i mapy, které se nacházejí přímo na lodi. Stači je jen pečlivě vyfotografovat digitálním fotoaparátem a na několik kliknutí myši je zkalibrovat v programu.
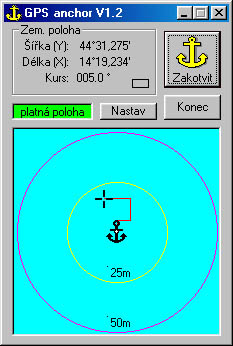 Zcela nepostradatelný pomocník je program GP Anchor, díky kterému můžeme v noci
klidně spát na zakotvené lodi i ve větru a máme jistotu, že program drží hlídku za
nás. Jakmile zjistí, že loď překročila hranici určenou pro kotvení spustí alarm.
Vyzvánění lodního zvonu z reproduktoru notebooku nás již několikrát zachránilo
před nechtěným dotykem s pevninou, když nás silný vítr v noci utrhl a vlekl
zátokou i s kotvou ke břehu. Naposledy to bylo v zátoce na ostrově Korčula, kde
jsme kotvili přes noc v sílícím Jugu, které 31.3.2010 v 5:40 přemohlo kotvu a začalo
nás táhnout zátokou. Během několika vteřin mne vzbudily zvony alarmu a tak jsem
nastartoval motor a znovu lépe zakotvil. Kotevní alarm se také osvědčil při vyvázání ke kotevní
bóji u ostrova Dugi otok, kdy vlivem větrných poryvů po celou noc se předřela obě
lana v kovovém oku bóje a loď byla najednou unášena ke skalisku větrem o síle 40 uzlů.
Okno programu ukazuje místo zakotvení symbolem kotvy a aktuální polohu lodi křížkem.
Dovolený nastavený rádius znázorňuje fialová kružnice. Pohyb lodi zanechává za sebou
červenou čáru a tak lze snadno po určité době rozpoznat krouživý pohyb kolem kotvy od
situace, kdy je kotva vlečena po dně.
Zcela nepostradatelný pomocník je program GP Anchor, díky kterému můžeme v noci
klidně spát na zakotvené lodi i ve větru a máme jistotu, že program drží hlídku za
nás. Jakmile zjistí, že loď překročila hranici určenou pro kotvení spustí alarm.
Vyzvánění lodního zvonu z reproduktoru notebooku nás již několikrát zachránilo
před nechtěným dotykem s pevninou, když nás silný vítr v noci utrhl a vlekl
zátokou i s kotvou ke břehu. Naposledy to bylo v zátoce na ostrově Korčula, kde
jsme kotvili přes noc v sílícím Jugu, které 31.3.2010 v 5:40 přemohlo kotvu a začalo
nás táhnout zátokou. Během několika vteřin mne vzbudily zvony alarmu a tak jsem
nastartoval motor a znovu lépe zakotvil. Kotevní alarm se také osvědčil při vyvázání ke kotevní
bóji u ostrova Dugi otok, kdy vlivem větrných poryvů po celou noc se předřela obě
lana v kovovém oku bóje a loď byla najednou unášena ke skalisku větrem o síle 40 uzlů.
Okno programu ukazuje místo zakotvení symbolem kotvy a aktuální polohu lodi křížkem.
Dovolený nastavený rádius znázorňuje fialová kružnice. Pohyb lodi zanechává za sebou
červenou čáru a tak lze snadno po určité době rozpoznat krouživý pohyb kolem kotvy od
situace, kdy je kotva vlečena po dně.
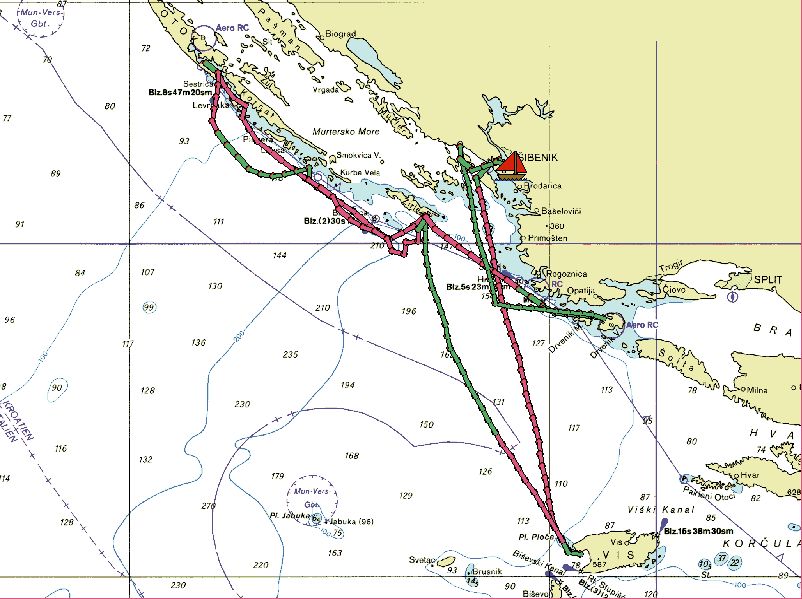
Co tato sestava všechno umí ? To je patrné z následujícího příkladu zaznamenané trasy.
Z výpisu dat lze vyčíst, že jsme upluli celkem 238 NM, z toho na 113 NM byl použit motor. V přehledné tabulce nalezneme automaticky zaznamenané jednotlivé etapy celé plavby a to bez jediné obsluhy přístroje. Záznamová jednotky totiž sama pozná zda plujeme nebo kotvíme a proto se nemůže stát, aby nějaký úsek v logu chyběl, protože někdo zapomněl před vyplutím přístroj zapnout. Velmi snadno se tak můžeme vracet k procházení celé trasy a pouhým zobrazením grafu rychlosti větru např. k první plavbě si znovu připomeneme okamžik ve kterém vítr cca 12 kn prudce zesílil během okamžiku na 28 kn a už jsme refovali. V programu elektonického lodního deníku tak pouhým tažením ukazatele v grafu lze sledovat sílu a směr větru (foukalo 28 kn zadobočně - L 134, tedy 134 stupňů měřeno od přídě z levoboku). Současně s tažením ukazatele v grafu sledujeme příslušnou pozici lodi na mapě, která se synchronně pohybuje s posunem ukazatele v grafu.
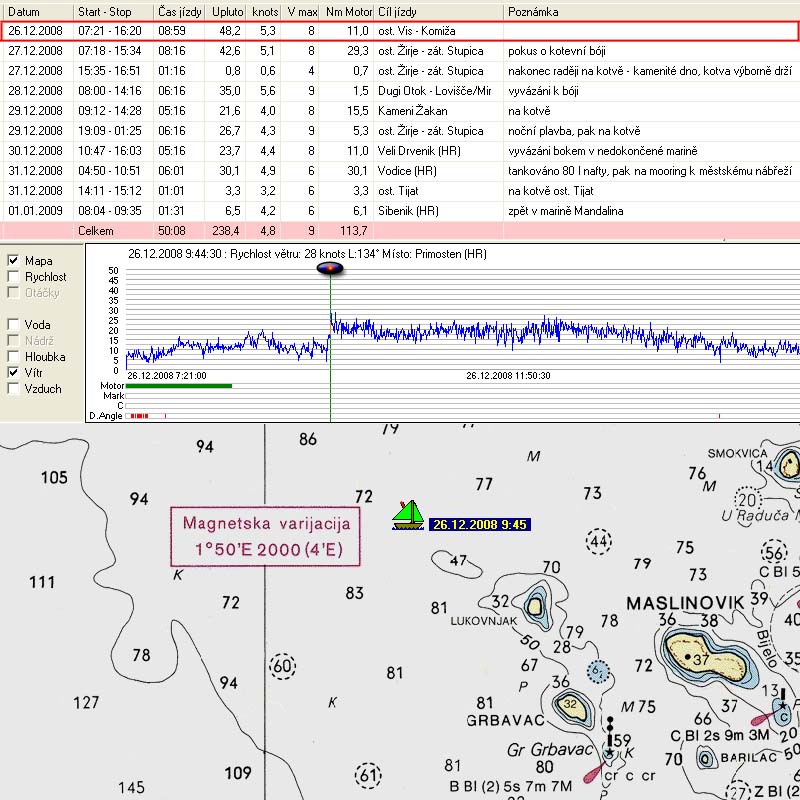
Tak tudy všude jsme propluli. Zelené úseky označují použití motoru.
Tato sestava vybavená komunikačním modulem odesílá on-line pozici lodi a díky tomu jsme vidět i za plavby v mapě na stránce aktualit. Princip ilustruje následující obrázek.