Technika plavby: Jak nahradit autopilota

Publikováno 1.4.2020
S touto otázkou jsem se silně potýkal v okamžiku, kdy jsem byl uprostřed Atlantiku a velikost vln dosáhla hodnoty, při které autopilot již nebyl schopen řídit loď. Protože se jednalo o sólovou plavbu, ztráta autopilota byla pro mne značně nepříjemná a prakticky mne přivázala ke kormidlu a znemožnila současnou plavbu s odpočinkem na spánek či přípravu jídla. Při sólové plavbě či s minimální posádkou je dobré na možnost, že nebude autopilot k dispozici, předem být připraven.
V dalším textu uvádím své praktické zkušenosti, jak jsem se se ztrátou autopilota vypořádal. Postup dále uvedený je použitelný výhradně při plavbě na plachty nikoliv na motor.
Pokud pevně zaaretuji kormidlo i při dobře nastavených plachtách, loď neudrží příliš dlouho plout stejným kurzem. Čím větší vlny jsou, tím je tato doba kratší. Plachetnice se sice nemá řídit kormidlem ale plachtami, kormidlo má jen mírně korigovat kurz aby jeho velká výchylka loď zbytečně nebrzdila, nicméně i při dokonalém trimu plachet a rovně aretovaném kormidle se loď v žádaném kurzu neudrží. Způsobují to proudy vody vyvolané vlnami, které z boku lodi vyvodí různé síly na různá místa trupu a především na kormidelní list a tím stočí loď mimo nastavený kurz. V tu chvíli je potřebný zásah kormidelníka, aby loď stočil zpět na kurz. Právě značná síla proudu vody ve velké vlně na kormidelní list zaaretovaného kormidla nejvíce loď vychýlí. Proto také ve velkých vlnách přestává být autopilot schopný dobře řídit loď, neboť se jen pere s vyrovnáváním značných odchylek od kurzu. Na rozdíl od autopilota je zde zkušený kormidelník lepší, protože reaguje na vlnu s předstihem, proudy vody umí z pozorování vlny odhadnout a neřeší až následné srovnávání kurzu se zpožděním jak je toho schopen autopilot. Při těchto úvahách si vzpomínám na knihu Petra Ondráčka – Sám čtyřmí oceány, kde popisuje své strasti s několika elektronickými autopiloty, až nalezl způsob pasivního autopilota, kterého realizoval z gumicuků a úspěšně při své plavbě používal. Ano gumicuk - to bude ono. Kormidlo je třeba seřídit, aby korigovalo směr lodi a zároveň pružně upevnit, aby při boční síle vyvolané proudem vody nekladlo velký odpor tím, že se touto silou bude moci samo otočit a po vymizení proudu vrátit do své nastavené polohy. Tak docílím toho, že proudy pod lodí ji výrazně nevychýlí z kurzu a síly na dobře vytrimovaných plachtách poženou loď žádaným směrem. Na rozdíl od Petra nemám kormidelní páku ale kormidelní kolo. A tak jsem se pustil do experimentování inspirovaný jeho systémem v aplikování gumicuků na kormidelní kolo právě na své sólové přeplavbě Atlantikem.
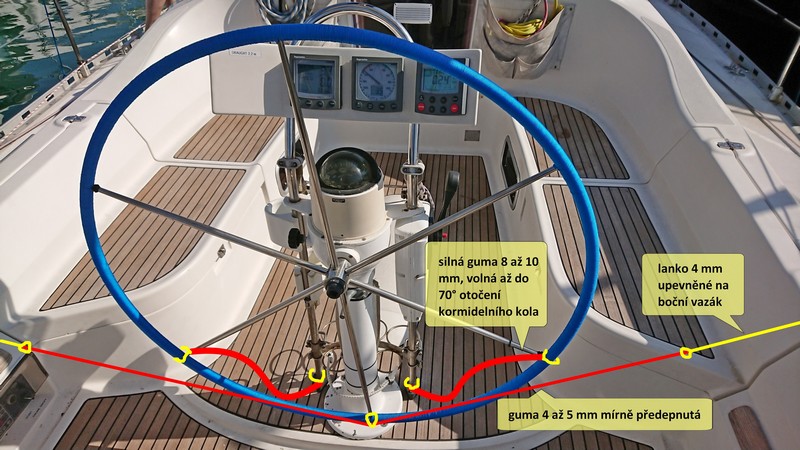
Lanka a gumicuky instaluji ke kormidlu a vše ladím několik hodin. Trimuji plachty tak, aby kormidlo bylo pro žádaný kurz rovně. Na vazáky z obou boků lodi navazuji krátká tenká lanka a mezi ně gumicuk o průměru 4 mm.

Střed mírně napnutého gumicuku přivazuji ke spodní části kormidelního kola. Správný kurz lodi dolaďuji přitažením gumicuku k jednomu či druhému boku lodi převázáním lanka na bočním vazáku.

Pluji ostře proti větru a tento gumicukový autopilot drží konstantní úhel k větru ve velkých vlnách lépe než elektronický. A hlavně nevybíjí akumulátory. Pružné držení kormidla umožní, že proud vody při přejezdu vlny si sám vychýlí kormidelní list a nezpůsobí vychýlení celé lodě tak, jak se to děje při pevné poloze kormidla. Jsem překvapen, když za celou hodinu nemusím na kormidlo sáhnout. Odcházím do lodi se ohřát. V tom se prudce loď přetočí z nastaveného kurzu, slyším vyvlát plachty, na kurz se již sama nevrací. Pohled na kormidlo vše vysvětluje. Vše funguje až do chvíle, kdy otočka kola je větší než 90°, pak nastane přetočení kormidelního kola o 180°. Z této polohy je návrat možný jedině ručně.
Abych zabránil nežádoucímu přetočení kormidelního kola, přidávám další dva silnější gumicuky o průměru 8 mm, které při otočení kormidelního kola o méně než 90° jsou volné a do systému nezasahují. Při dosažení 70° otáčky kormidelního kola se začínají napínat a vyvozují velkou vratnou sílu k návratu výchylky otočení kola pod 90°. Po této úpravě ani velké vlny již nezpůsobily selhání řízení tohoto systému. Samozřejmě je důležité mít dobře vytrimované plachty, jinak to fungovat nebude.
S průměry gumicuků a jejich předepnutí je potřeba experimentovat podle konkrétní lodi a jejího kormidelního mechanizmu. Uvedené řešení se mi osvědčilo na jednotrupé plachetnici dlouhé 12 metrů. Když už jsem měl systém vyladěný, jeho opětovné nasazení netrvalo nijak dlouho. Ve větších vlnách, zvláště když pluji s bočním nebo předobočním větrem, gumicukového autopilota často rád použiji místo toho elektronického. Aplikace gumicuků a trim plachet mi nezabere více jak 20 minut.
Co dělat na plachetnici, pokud selže autopilot a plujete sami či s malou posádkou? Přečtěte si, jak můžete prostřednictvím gumicuků nahradit elektronického autopilota v aplikaci na kormidelní kolo. (Publikováno 1.4.2020)
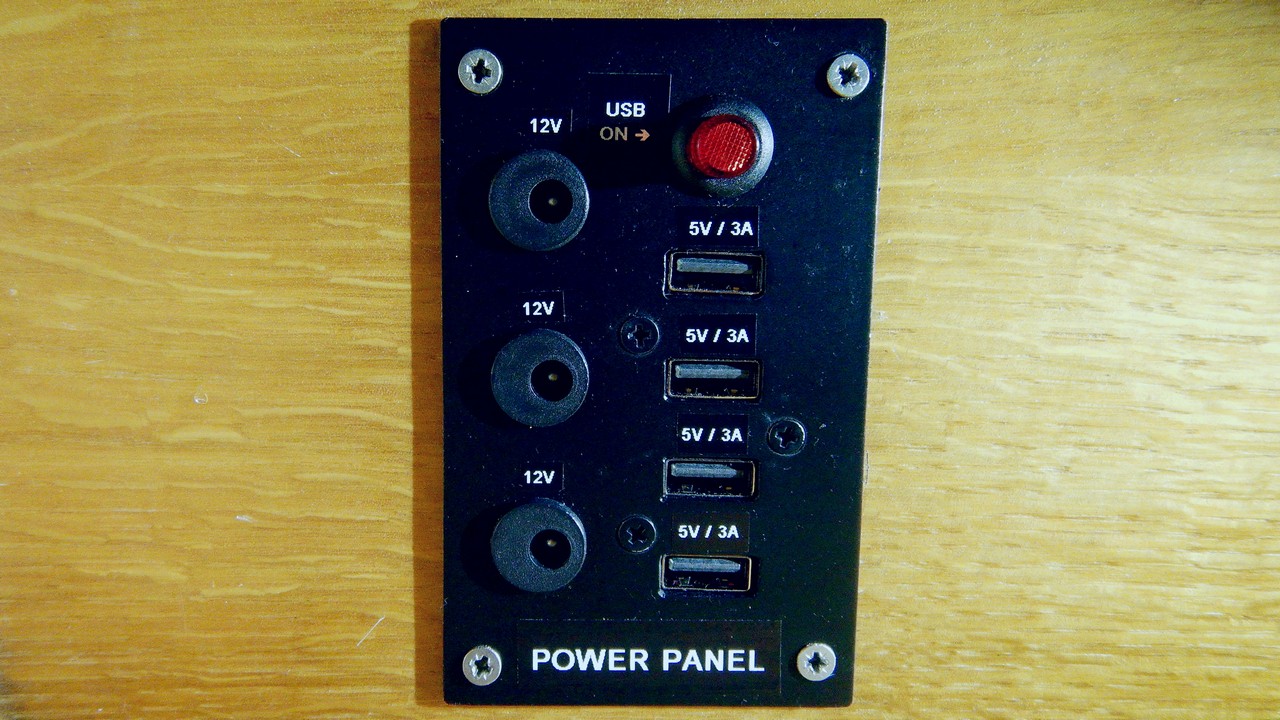
Ne vždy nám vyhovují řešení, které lze koupit. Proto často hledám vlastní řešení a vyrobím si věc sám. Článek jsem napsal pro inspiraci jak lze USB nabíjení v lodi elegantně realizovat jinak než koupí hotových nabíjecích adaptérů, které nemusí z různých důvodů vyhovovat, třeba tím, že nenabízí potřebný počet nabíjecích zásuvek v provedení, které se dá zapustit do stěny interiéru. (Publikováno 1.8.2021)

Výběr správné obuvi na loď patří k jednomu z nejdůležitějších kroků a určitě není vhodné ho podcenit. V článku si ujasníme, jaký je rozdíl mezi jachtařkou obuví a běžnými teniskami. Víte, čím se jachtařské holinky liší od klasických a jak tedy vybrat vhodné boty na loď? Následující článek vychází z našich zkušeností a odborné konzultace s Tomášem Krejzou ze Sailing Centra s.r.o. Zabývám se v něm tedy především tím, jakou obuv používáme my a proč. (Publikováno 1.4.2024)